еЊвЊ:ЫцзХПЊВЩЩюЖШКЭПЊВЩФбЖШЕФдіМгЃЌвдМАЖдХРЦТФмСІЕФВЛЖЯвЊЧѓЃЌЕЅЙьЕѕзАжУзїЮЊУКПѓИЈжњдЫЪфЕФживЊВЙГфЃЌЗЂЛгзХВЛПЩЬцДњЕФзїгУЁЃИљОнЗРБЌВёгЭЛњЕЅЙьЕѕЕФЬиадЃЌЩшМЦСЫвЛЬзаТаЭЕЅЗЈРМВюбЙБфЫЭЦїМрВтгыПижЦзАжУЃЌИУзАжУВЩгУCANзмЯпЭъГЩЩшБИжЎМфЕФНЛЛЅЃЌПЩгааЇЕиМѕЩйЯпЪјЃЌЭЈЙ§ВйзїЪжБњМАПЊЙиЃЌПЩПижЦМаНєЁЂжЦЖЏЁЂЫІЧ§ЁЂЦ№ЕѕЁЂееУїЁЂУљЕбЕШЯрЙижДааЖЏзїЃЌВЂЪЕЯжЗРБЌВёгЭЛњздЖЏБЃЛЄВЮЪ§ЁЂзАжУбЙСІВЮЪ§ЁЂааГЕВЮЪ§ЕШЭГвЛМрПиЁЃИУзАжУФПЧАвбЭъГЩОЎЯТЙЄвЕадЪдбщЃЌИїЯюадФмжИБъДяЕНСЫЩшМЦвЊЧѓЁЃ
0 в§бд
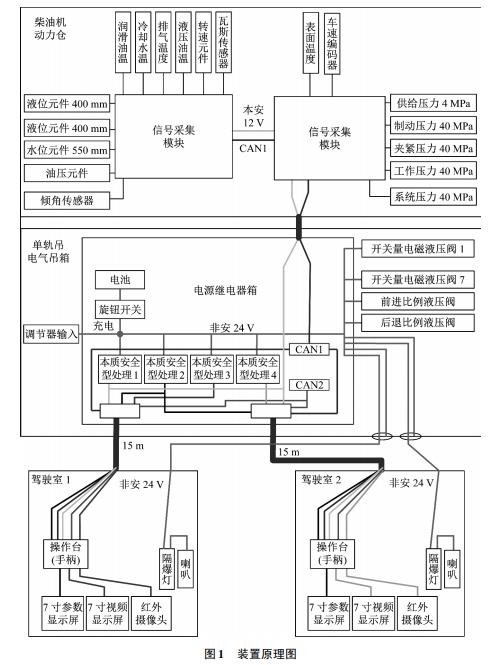
УКПѓЪЙгУЕФИпаЇИЈжњдЫЪфЩшБИжївЊгаЮоЙьНКТжГЕЁЂЕЅЙьЕѕЁЂПЈЙьГЕЁЂГнЙьГЕЁЃЕЅЙьЕѕЛњГЕПЩвдЪЕЯжДгГЕГЁжСЙЄзїУцжБДядЫЪфЃЌвдЦфНсЙЙНєДеЁЂЛњЖЏСщЛюЁЂзЊЭфАыОЖаЁЁЂЖрЙЄзїУцЭЌЪБзївЕЕШЬиЕуЃл1ЃнЃЌГЩЮЊОЎЯТИпаЇИЈжњдЫЪфЛњаЕЩшБИЁЃЕЅЙьЕѕзАжУГфЗжРћгУЯяЕРЕФЩЯВППеМфЃЌгУгкжДааШеГЃШЫдБЁЂЮяСЯЕФдЫЫЭЃЌвдМАвКбЙжЇМмЕФећЬхАсдЫШЮЮёЁЃ
ИљОнЖЏСІВЛЭЌЃЌЕЅЙьЕѕЛњГЕОпгаЖржжаЮЪНЃЌАќРЈ:аюЕчГиЕЅЙьЕѕЁЂЗчЖЏЕЅЙьЕѕЁЂЗРБЌВёгЭЛњЕЅЙьЕѕЃл2ЃнЁЃгЩгкЕчГиЖЏСІгаЯоКЭЧІЫсЕчГидкУКПѓОЎЯТЪЙгУЪмЯоЕФдвђЃЌвдаюЕчГизїЮЊЖЏСІЕФЕЅЙьЕѕЛњГЕЛсдНРДдНЩй;ЗчЖЏЕЅЙьЕѕЬсЙЉЕФЖЏСІНЯаЁЃЌЦфНсЙЙаЮЪНМђЕЅЁЂЬхЛ§аЁЃЌжївЊгУгкПеМфеаЁдЫЪфвЊЧѓЕЭЕФГЁЫљ;ЗРБЌВёгЭЛњЕЅЙьЕѕОпгаЧЃв§СІДѓЁЂХРЦТФмСІЧПЁЂСщЛюЁЂАВШЋЁЂИпаЇЕШЬиЕуЃл3ЃнЃЌЦфгІгУЛсдНРДдНЙуЗКЁЃ
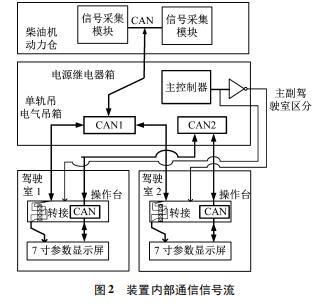
еыЖдЗРБЌВёгЭЛњЕЅЙьЕѕЕФЬиЕуЃЌБОЮФЩшМЦСЫвЛЬзаТаЭЕЅЗЈРМВюбЙБфЫЭЦїМрВтгыПижЦзАжУЁЃИУзАжУПЩЪЕЪБМрВтЯдЪОВёгЭЛњздЖЏБЃЛЄВЮЪ§ЁЂЯЕЭГбЙСІВЮЪ§( жЦЖЏбЙСІЁЂМаНєбЙСІЁЂВЙгЭбЙСІЁЂЦ№ЖЏбЙСІЁЂЙЄзїбЙСІ) ЁЂШѓЛЌгЭЮТЖШЁЂвКбЙгЭЮТЖШЁЂааГЕЧуНЧЕШЁЃ 1 зАжУЙЄзїдРэИУЗРБЌВёгЭЛњаТаЭЕЅЗЈРМВюбЙБфЫЭЦїМрВтгыПижЦзАжУЕФЙЄзїдРэШчЭМ 1 ЫљЪОЁЃзАжУАќРЈаХКХВЩМЏФЃПщЁЂЕчдДМЬЕчЦїЯфЁЂЪжБњПЊЙиЁЂЯдЪОЩшБИвдМАИїжжДЋИадЊМўЃЌГ§ДЋИадЊМўЭтЃЌИїзщГЩФЃПщВЩгУ CAN змЯпНјааЪ§ОнНЛЛЅЃл3ЃнЁЃ
1 зАжУЙЄзїдРэ
ИУЗРБЌВёгЭЛњаТаЭЕЅЗЈРМВюбЙБфЫЭЦїМрВтгыПижЦзАжУЕФЙЄ
 NreбЙСІБфЫЭЦї_ВюбЙБфЫЭЦї_вКЮЛБфЫЭЦї_ЮТЖШБфЫЭЦї
NreбЙСІБфЫЭЦї_ВюбЙБфЫЭЦї_вКЮЛБфЫЭЦї_ЮТЖШБфЫЭЦї
1) ЕчдДМЬЕчЦїЯфЪЧећИізАжУЕФОіВпКЭПижЦжааФЃЌНгЪеРДздаХКХВЩМЏФЃПщКЭЪжБњПЊЙиЕФЪ§ОнЃЌИљОнаХКХВЩМЏФЃПщКЭЪжБњПЊЙиаХКХжИЪОИКд№жДааЖдгІЕФЕчДХЗЇПижЦЁЃПижЦаХКХЗЂГіКѓЃЌвКбЙЕчДХЗЇжДааЖдгІЕФЖЏзїЃЌЯргІЕФвКбЙЛиТЗЕФбЙСІЛсЗЂЩњБфЛЏЃЌаХКХВЩМЏФЃПщНгШыЕФбЙСІДЋИаЦїВЩМЏЙмТЗбЙСІЃЌНЋЪ§ОнЛиДЋИјЕчдДМЬЕчЦїЯфЃЌЕчдДМЬЕчЦїЯфНЋНгЪеЕНЕФбЙСІЪ§ОнКЭЗЂГіЕФПижЦУќСюНјааЖдБШЃЌИљОнЩшЖЈЪ§ОнЛђТпМХаЖЯИјГіе§ГЃЛђепБЈОЏаХЯЂЃЌвдКУСЂ ID БрТыЗЂЫЭжСЯдЪОЩшБИЃЌгЩЯдЪОЩшБИИКд№е§ГЃЯдЪОЛђепБЈОЏЬсЪОЃЌЪЕЯжвКбЙЛиТЗЕФБеЛЗПижЦЃл4ЃнЁЃЭЌЪБЃЌЕчдДМЬЕчЦїЯфЛЙИКд№ИјЯдЪОЩшБИЁЂЪжБњПЊЙиЁЂаХКХВЩМЏФЃПщвдМАЪгЦЕМрПиЩшБИЬсЙЉБОАВЕчдДЁЃ
2)аХКХВЩМЏФЃПщИКд№ЗРБЌВёгЭЛњздЖЏБЃЛЄВЮЪ§КЭЯЕЭГбЙСІЯрЙиВЮЪ§МрВтКЭВЩМЏЃЌЭЌЪБНЋМрВтВЮЪ§Ъ§ОнвдКУСЂIDБрТыЭЈЙ§CANзмЯпЗЂЫЭжСЕчдДМЬЕчЦїЯфЁЃЕБздЖЏБЃЛЄВЮЪ§ГЌЯоЪБЃЌаХКХВЩМЏФЃПщЗЂГіЯЈЛ№ПижЦУќСюИјЕчдДМЬЕчЦїЯфЃЌгЩЕчдДМЬЕчЦїЯфПижЦЭтВПжДааЩшБИЪЕЯжЭЃЛњЯЈЛ№ЁЃ
3)ЯдЪОЩшБИКЭКьЭтЩуЯёЭЗИКд№ЪгЦЕМрПивдМАЕЅЙьЕѕЙЄПіВЮЪ§ЕФЯдЪОЃЌСНИіЪгЦЕЯдЪОЩшБИАВзАдкМнЪЛЪвЕФРяУцЃЌКьЭтЩуЯёЭЗИКд№МрЪгФГаЉЪгЯпЪмзшЛђЮЃЯеЕФЧјгђЁЃ
4)МнЪЛдБВйзїЪжБњПЊЙигУРДПижЦЕЅЙьЕѕЛњГЕЃЌЪЕЯжМБЭЃЁЂУљЕбЁЂееУї(дПГзВхШы)ЁЂЫІЧ§ЁЂжЦЖЏЁЂЧАНјЁЂКѓЭЫЕШЖЏзїЁЃ
2 гВМўЩшМЦ
ИљОнMT/T989—2006ЁЖПѓгУЗРБЌВёгЭЛњЮоЙьНКТжГЕЭЈгУММЪѕЬѕМўЁЗвдМАMT/T883—2000ЁЖПѓгУВёгЭЛњЕЅЙьЕѕЛњГЕЁЗаавЕБъзМЕФвЊЧѓЃЌашЖдзАжУжаЗРБЌВёгЭЛњздЖЏБЃЛЄВЮЪ§ЁЂЛњГЕЯЕЭГбЙСІВЮЪ§(жЦЖЏбЙСІЁЂМаНєбЙСІЁЂВЙгЭбЙСІЁЂЦ№ЖЏбЙСІЁЂЙЄзїбЙСІ)ЁЂШѓЛЌгЭЮТЖШЁЂвКбЙгЭЮТЖШЁЂааГЕЧуНЧНЧЖШЕШНјааМрВтЃл4-5ЃнЁЃ
2ЃЎ1аХКХВЩМЏФЃПщ
аХКХВЩМЏФЃПщВЩМЏ3ТЗВЌЕчзшЮТЖШаХКХЁЂ1ТЗПЊЙиСПгЭбЙЁЂ1ТЗПЊЙиСПЫЎЮЛаХКХЁЂ1ТЗМзЭщБфЫЭЦїSMbusаХКХЃЌВЂНЋЕБЧАЪ§ОнЪЕЪБЯдЪОГіРДЃл6ЃнЁЃЕБМрВтСПГЌБъ(ШчЗЂЖЏЛњЫЎЮТЙ§Ип)ЛђепЙЪеЯ(ШчМзЭщБфЫЭЦїЖЯЯп)ЪБЃЌаХКХВЩМЏФЃПщИљОнВЩМЏаХКХНјааХаЖЯЃЌНјааЩљЙтБЈОЏЁЃ
аХКХВЩМЏФЃПщОпБИЗЧАВЮодДНгЕуПЊЙиКЭЕчДХЗЇПижЦЙІФмЃЌЕБаХКХВЩМЏФЃПщИљОнТпМХаЖЯашвЊЭЃГЕЯЈЛ№ЪБЃЌИјГіБОАВПижЦаХКХВЂИєРыЪфГіЃЌПижЦЗЧАВЮодДНгЕуПЊБеКЭЕчДХЗЇЦјТЗЛЛЯђЃЌПЩвдЪЕЯжЭЃГЕЯЈЛ№ЁЃ
2ЃЎ2ЪжБњВйзїЬЈ
ПѓгУБОАВаЭВйзїЬЈгУгкЪЕЯжЗРБЌВёгЭЛњЕЅЙьЕѕЛњГЕећГЕаТаЭ
ЕЅЗЈРМВюбЙБфЫЭЦїЩшБИЕФПижЦЙІФмЁЃПижЦЯфФмЪЕЯж1ТЗБОАВЕчдДЪфШыЁЂ8ТЗБОАВПЊЙиСПаХКХЪфШыЁЂ1ТЗБОАВФЃФтаХКХЪфШыЁЂ4ТЗБОАВПЊЙиСПЪфГіЁЂ1ТЗБОАВCANЭЈаХЁЂ10ТЗБОАВЖЫзгНгЯпЁЃ
2ЃЎ3ЕчдДМЬЕчЦїЯф
ЕчдДМЬЕчЦїЪЕЯж12ТЗЗЧАВгадДПЊЙиСПЪфГіЁЂ2ТЗЗЧАВЗНВЈТіГхПэЖШЕїжЦаХКХЪфГіЁЂ4ТЗБОАВЕчдДЪфГіЁЂ2ТЗБОАВПЊЙиСПЪфГіЁЂ2ТЗБОАВИєРыCANЭЈаХЁЃЦфжаЃЌ12ТЗЗЧАВгадДПЊЙиСПЪфГіжївЊПижЦЖдЯѓЮЊ:2ТЗЭЃЛњЕчДХЗЇЁЂ2ТЗжЦЖЏЕчДХЗЇЁЂ1ТЗЦ№ЕѕЕчДХЗЇЁЂ2ТЗЫІЧ§ЕчДХЗЇЁЂ2ТЗИєБЌееУїЕЦЁЂ2ТЗННЗтРЎАШЁЂ1ТЗдЄСєЁЃ2ТЗЗЧАВЗНВЈТіГхПэЖШЕїжЦаХКХЪфГіжївЊПижЦЧАНјКЭКѓЭЫБШР§ЕчДХЗЇЁЃ4ТЗБОжЪАВШЋаЭЕчдДЪфГіжївЊИјЪжБњВйзїЬЈЁЂБОжЪАВШЋаЭВЮЪ§ЯдЪОЦїЁЂБОжЪАВШЋаЭЪгЦЕЯдЪОЦїЁЂБОжЪАВШЋаЭЩуЯёЭЗЁЂаХКХВЩМЏЩшБИЕШЙЉЕчЁЃ2ТЗБОжЪАВШЋаЭПЊЙиСПЪфШыЮЊЪжБњВйзїЬЈЕФМБЭЃПЊЙиЪфШыЃЌгУгкМБЭЃЕЅЙьЕѕЛњГЕЁЃ2ТЗБОжЪАВШЋаЭИєРыCANЭЈаХгУгкаХКХВЩМЏЩшБИЁЂБОжЪАВШЋаЭВЮЪ§ЯдЪОЦїгыПижЦЯфжЎМфЕФЭЈаХЁЃ
3 ШэМўЩшМЦ
зАжУФкВПЭЈаХаХКХСїШчЭМ2ЫљЪОЁЃаХКХВЩМЏФЃПщВЩМЏЭтЮЇДЋИаЦїаХКХЃЌВЂНЋЦфЖЫПкВЩМЏЕФДЋИаЦїаХКХвдКУСЂЕижЗБрТыаЭЌЪ§ОнЕФаЮЪНЗЂЫЭжСCAN1змЯпЃЌаХКХВЩМЏФЃПщЕФХфжУаХЯЂгЩВЮЪ§ЯдЪОЦСЯТЗЂЁЃЕчдДМЬЕчЦїЯфНгЪеРДздаХКХВЩМЏФЃПщКЭЪжБњВйзїЬЈЪ§ОнЃЌЭЌЪБИљОнПижЦЗЂГіжИСюКЭЗДРЁаХЯЂИјГіжДааНсЙћЃЌЕБПижЦЗЂГіжИСюКЭЗДРЁЪ§ОнВЛвЛжТЪБЃЌгІИјГіБЈОЏаХКХжСCAN2змЯпЁЃЪжБњВйзїЬЈИљОнЯргІПижЦЖЏзїЗЂГіПижЦаХКХжСCAN2змЯпЁЃВЮЪ§ЯдЪОЦСНгЪеCAN1КЭCAN2змЯпЪ§ОнЃЌНјааЪ§ОнЯдЪОКЭБЈОЏЬсЪОЕШЁЃ
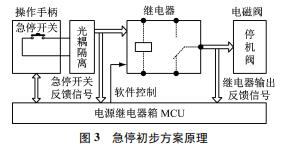
4 ЕЅЙьЕѕМБЭЃЗНАИЩшМЦ
ЕЅЙьЕѕЕФМБЭЃЩцМАдЫааЕФАВШЋЃЌЩшМЦжаВЩгУШпгрЗНАИЃЌдРэШчЭМ 3 ЫљЪОЁЃ 1) ЭЈ аХМБЭЃЗНЪНЁЃЭЈЙ§ЪжБњВйзїЯфВЩМЏ“МБЭЃ”ПЊЙиаХКХЃЌЭЈЙ§ CAN змЯпЗЂЫЭжСЕчдДМЬЕчЦїЯфЃЌгЩЕчдДМЬЕчЦїЯфИКд№ 2 ИіЭЃЛњЗЇЯЈЛ№ЭЃЛњЁЃ 2) гВМўМБЭЃЗНЪНЁЃНЋ“МБЭЃ”ПЊЙиаХКХжБНгв§ШыЕчдДМЬЕчЦїЯфЃЌПижЦ 2 ИіЭЃЛњЗЇЯЈЛ№ЭЃЛњЁЃ
5 ЕчГиШнСПМЦЫу
ЕЅЙьЕѕЦєЖЏЧАашвЊМрВтИїИіДЋИаЦїзДЬЌвдМАЕБЧАЛЗОГЭпЫЙХЈЖШЃЌД§ИїЯюВЮЪ§е§ГЃЧвЗћКЯЦєЖЏВёгЭЛњЬѕМўКѓВХдЪаэЦєЖЏЩшБИЃЌвђДЫЩшМЦжаПѓгУИєБЌМцБОжЪАВШЋаЭЕчдДМЬЕчЦїЯфашХфжУКѓБИЕчГиЁЃЕчГиШнСПЭЦЫуШчЯТ:
1)аХКХВЩМЏФЃПщ:500mA/12V;
2)ЪжБњВйзїЯф:300mA/12V×2=600mA/12V;
3)7ДчВЮЪ§ЯдЪОЦї:550mA/12V×2=1100mA/12V;
4)ЕчдДМЬЕчЦїЯф:500mA/24VЁЃ
вдЩЯелЫуГЩDC24VЪБЙЄзїЕчСїЃЌЕчдДаЇТЪАДее70%ЙРЫуЃЌдкDC24VЪБЕчСїдМЮЊ2AЁЃШєАДееКѓБИЕчдДдкжїЕчдДЖЯЕчЧщПіЯТФмЙЛЙЄзї2hМЦЫуЃЌКѓБИЕчдДбЁгУВЛаЁгкC24V/4AhЁЃ
6 НсТл
ЖдзАжУИїИіЩшБИЭЈаХЗНЪНМАЯпЪјЙЄвеНјааЙцЛЎЃЌМрВтЩшБИЁЂЯдЪОЩшБИЁЂПижЦЪжБњМАПЊЙиЁЂПижЦПЊЙиЩшБИжЎМфЕФЭЈаХВЩгУCANзмЯпЃл5ЃнЃЌЙиМќжДааВйзїШч“МБЭЃ”ашЕЅКУЯпРТПижЦЃЌбЁаЭЖраОЕчРТСЌНгМнЪЛЪвКЭЛњГЕМЬЕчЦїЯфЃЌБмУтГіЯжЖрИљЯпРТРІдњдквЛЦ№ЁЃНсЙЙЩЯЃЌЕчдДМЬЕчЦїЯфВЩгУЕѕзАЃЌВЂдкАВзАЮЛжУдіМгеёЖЏЛКГхЕцЩшМЦЃЌМѕЛКСЫЛњГЕдкаазпЙ§ГЬжаВњЩњЕФеёЖЏЖдЕчдДМЬЕчЦїЯфЕФгАЯьЁЃ
ИУзАжУФПЧАЭъГЩСЫЙЄвЕадЪдбщЃЌИїЯюадФмжИБъДяЕНСЫЩшМЦвЊЧѓЃЌКѓЦкашЖдШэМўЃЌгШЦфЪЧдкЙЪеЯФЃЪНЯТЕФгХЯШДІРэЁЂПижЦСїГЬНјаагХЛЏЁЃ
зЂУїЃЌ永利总站总区вЧБэЮФеТОљЮЊдДДЃЌзЊдиЧыБъУїБОЮФЕижЗ